(Fast) alles über Drohnen
Ausgangslage Link to heading
Artikel wird noch überarbeitet da Stand noch 2020
(vor allem bzgl. aktuellem Drohnenrecht)
Jetzt im Frühjahr beginnen Menschen wieder gerne mit Freizeitaktivitäten draußen. Beim Sport, Wanderungen oder Ausflügen wird auch gerne photographiert. Dafür werden neben Smartphones und „richtigen“ Kameras zunehmend auch Multikopter und andere unbemannte Fluggeräte (UAVs) eingesetzt - für die sich (meist nicht ganz richtig) der negativ besetzte Begriff „Drohne“ durchgesetzt hat. So wurden allein in Deutschland im Jahr 2017 fast eine Million „semiprofessionelle“ und noch mal fast eine Viertelmillion „Spielzeugdrohnen“ verkauft (siehe Statista).
Das ist recht erstaunlich, weil es zumindest in Ballungsgebieten wie Rhein-Main nahezu und in Naturschutzgebieten gänzlich verboten ist, eine „semiprofessionelle“ Drohne zu fliegen; bei Anzeige drohen Strafen im fünfstelligem Euro-Bereich. Derartige „Drohnen“ über 250g Abfluggewicht müssen auch mit einem feuerfesten Kennzeichen versehen sein und der Pilot benötigt unbedingt eine spezielle Drohnen-Haftpflichtversicherung - nach Umsetzung der EU-Drohnen-Regeln von 2019 auch noch einen „Kenntnisnachweis“ (kleiner „Drohnenführerschein“) - in ganz Europa.
Andererseits werden Drohnenkäufer kaum über die Gesetzeslage informiert und Elektronik- und Photo-Großmärkte, Versandhändler, sogar Baumärkte und Discounter verkaufen „arglosen“ Kunden „Drohnen“, die allein aufgrund ihres Gewichts über 250g schon als „semiprofessionell“ gelten. Diese sind in der eigenen Wohnung ohne Positionserkennung kaum flugfähig und draußen darf im weiten Umkreis meist gar nicht geflogen werden.
Sensations-gierige Medien, verängstigte und durch Lärm oder Verletzung der Privatsphäre genervte Drohnengegner treffen so auf eine zunehmende Zahl von uninformierten Drohnen-Einsteigern, die ihr neues Fluggerät weder beherrschen noch ihre stark eingeschränkten Rechte kennen und verbotenerweise dann in Wohngebieten, Parks, Naturschutzgebieten oder gar Kontrollzonen der Flughäfen herumfliegen und auch dieses Jahr wieder häufig für aktenkundige Vorfälle und neue Negativ-Schlagzeilen sorgen.
Eine weitere Falle für schlecht informierte Drohnen Käufer sind billige Plagiate guter - wirklich semiprofessioneller - Drohnen von bekannten Herstellern wie DJI oder Parrot. Die Originale sind mit GPS-Empfängern, umfangreicher Telemetrie (Barometer, Beschleunigungsmesser, Gyroskop, Kompass, visueller Positionserkennung und Abstandsmessung, Kollisionschutz etc. pp.) ausgestattet und können z.B, bei WIFI Verbindungsproblemen teilautonom zum Abflugort zurückkehren und dort automatisch und sicher landen. Auch nutzen sie umfangreiches Kartenmaterial und starten in Verbotszonen gar nicht erst.
Das alles rechtfertigt Verkaufspreise von deutlich über 500€ für solch eine Drohne- oft kostet eine brauchbare Fernsteuerung dann noch extra. So wird aber ein Plagiat der 1000 Euro teuren DJI Mavic als “DroneX” in Anzeigen überall meist für „nur 99 Euro angeboten - man kann sie direkt bei chinesischen Versandhändlern wie Banggood aber schon für $35 bestellen.
Mehr ist dieser kaum sicher beherrschbare „China-Schrott“ aber auch nicht wert, denn er hat noch nicht einmal GPS, geschweige denn eine visuelle Positionserkennung und die Möglichkeit Hindernisse autonom zu umfliegen.
Ein Laie wird mit so etwas bei Verbindungsabbruch oder Pilotenfehler leicht einen „Flyaway“ erleben und das Ding fliegt dann unkontrolliert z.B. in der Kontrollzone (CTR) des Frankfurter oder Wiesbaden-Erbenheimer Flughafens herum (In letzterer liegt Mainz und Wiesbaden noch fast komplett).
Dann wird wieder für Stunden der gesamte Flugverkehr gesperrt, die Allgemeine Zeitung hat wieder eine schöne Schlagzeile, der “Bruchpilot” muss für einen Millionenschaden aufkommen und alle Hobby- und Modellflug- Piloten haben das Nachsehen durch noch härtere Einschränkungen. Deshalb sollte (im Gegensatz zum angesprochenen Zeitungsartikel) Billigdrohnen-Flieger auch nicht ohne Absprache und Erlaubnis auf einem Modellflugplatz herumfliegen - aufgrund der oben genannten Vorfälle sind Kopterpiloten bei Modellfliegern ohnehin nicht wohl gelitten, zumal man auf deren Plätzen nicht mit allen für Drohnen angebotenen Haftpflichtversicherungen fliegen darf (eine spezielle Haftpflichtversicherung ist für jeden Drohnenpilot vorgeschrieben), sondern nur der des Vereins.
UAV - Nutzung Link to heading
Das Luftverkehrsgesetz (LuftVG) verwendet den Begriff “Unpiloted Aerial Vehicle (UAV)” für alle ferngesteuerten Fluggeräte. Auf Sicht ferngesteuert müssen momentan alle noch sein, der Betrieb “vollautonom” fliegender Drohnen ist in Deutschland generell verboten. Wenn der Drohnenpilot etwa mit einem VR-Headset Drohnenrennen fliegt, benötigt er eine zweite Person als “Spotter”, welcher den Flug der Drohne mit bloßem Auge (ohne Fernglas) verfolgen und den Piloten warnen oder mit einer “Lehrer”- Fernsteuerung die Kontrolle übernehmen kann, wenn der Drohnenpilot einen Fehler macht.
Die Racing-Drohnen zeigen bereits, dass sich UAVs hinsichtlich Einsatzbereich bzw. Motivation der Betreiber stark unterscheiden. Als die häufigsten im privatem Umfeld vorkommenden Nutzungen für Drohnen möchte ich hier unterscheiden:
| Einsatzbereich | Motivation | wichtigste Anforderung an Drohne |
|---|---|---|
| Modellbau | Detailgetreuer Nachbau “richtiger” Flugzeuge/Helikopter und authentische Flugeigenschaften | wird selbst gebaut und erweitert |
| Fun-Flyer | risikoloser Spielspaß mit flugfähigem Spielzeug | leicht und ungefährlich zu fliegen und preiswert |
| Selfie-Fotografen | eigene Freizeitaktivitäten und Urlaubserlebnisse aus der Luft auf Videos dokumentieren | unkompliziert auch ohne Fernbedienung (etwa mit Gesten) zu steuern |
| Racing | sportlicher Wettkampf mit sehr schnellem Flug durch ein Hindernis-Parcours | Geschwindigkeit und Tuning/Bastel-Möglichkeiten |
| Foto/Video-Amateure | Fotografieren und Filmen aus ungewohnter Perspektive | hohe Flugstabilität, gute Kamera und separate Kamerasteuerung (Gimbal) |
| Observierung | Bauten und Gelände auf Schäden untersuchen, dokumentieren und kartographieren | siehe Foto/Video + Erweiterbarkeit der Sensorik und Telemetrie |
Der Punkt “Observierung” geht dann schon meist in gewerbliche Anwendungen über, auch wirklich professionelle Videos erfordern neben dem Piloten einen Kameramann, der nur den Gimbal mit Extra-Fernsteuerung steuert; in diesem Beitrag klammere ich gewerbliche Nutzung aus, da sie meist auch mit mehr Ausnahmegenehmigungen und Auflagen verbunden ist, die für Hobbypiloten nicht relevant sind.
Die Tabelle zeigt, dass man sich vor Anschaffung einer Drohne überlegen sollte, wofür man sie einsetzen will und kann dann erst entscheiden, auf welche Eigenschaften des Fluggeräts man am meisten Wert legt, denn auch die Hersteller produzieren Zielgruppen-orientiert. Natürlich spielen auch Anschaffungskosten, eigene Fertigkeiten, Geschicklichkeit und Lernbereitschaft eine Rolle. Ein Hobbyfotograf wird eine für sich geeignete Photodrohne nicht für unter 1000 Euro bekommen, brauchbare Racing-Drohnen bekommt man schon ab 100 Euro, aber man braucht ein phantastisches Reaktionsvermögen um so ein bis 200 km/h schnelles und extrem agiles Fluggerät zu beherrschen. Fun-Drohnen sollten nicht viel mehr als 100 Euro kosten, aber auch für Jugendliche (Drohnen sind kein Kinderspielzeug!) ungefährlich und ohne hohes Schadensrisiko vor allem zuhause verwendbar sein.
Mit der unterschiedlichen Nutzung gehen auch unterschiedliche Nutzergruppen bzw. Vereine einher. Bei Modellflug-Vereinen und -Plätzen treffen sich traditionell hauptsächlich Modellbauer - vielleicht auch noch Racer. Zu Nutzern käuflicher Fun- und Photo-Drohnen hat man da kaum Berührungspunkte.
Flugprinzip Link to heading
Drohnen bzw. UAVs werden heute meist mit Multikoptern gleichgesetzt, die gibt es aber noch gar nicht so lange, weil 4 oder mehr Rotoren kaum von einem Menschen noch direkt kontrolliert werden können. Die Programmierung eines Flight-Controllers und einige Sensoren erledigen hier die Motorsteuerung der Rotoren.
Tragflächen Link to heading
Klassischer Modellflug basiert heute noch meist auf dem Auftrieb von (Trag-)Flächen - wie bei Flugzeugen. Auftrieb existiert nur, wenn ständig Luft ein Profil (die Tragfläche) umströmt. Wird eine Mindestgeschwindigkeit unterschritten, kommt es zum Strömungsabriss und ein Absturz des nicht mehr steuerbaren Fluggeräts ist fast unvermeidlich. Ein Flächen-Flugmodell kann also nicht in der Luft stehen bleiben, braucht eine Start/Landebahn und wird über Höhenruder, Seitenruder und Querruder vom Piloten direkt gesteuert. Es kann Kurven fliegen, aber sich nicht direkt (ohne stetige Vorwärtsbewegung) um alle drei Hauptachsen drehen und fliegt immer nur vorwärts. Das bedingt eine völlig andere (Fern-)Steuerung als ein Rotor-angetriebenes Flugobjekt, erfordert viel Übung und schränkt so die oben beschriebenen Nutzungsmöglichkeiten stark ein. Andererseits erreicht man mit weniger Motorleistung mehr Geschwindigkeit und eine längere Flugdauer. Auch braucht das Fluggerät keine “Eigenintelligenz” (Sensoren und Rechenpower), die ersten Funkfernsteuerungen arbeiteten noch mit analoger Radiotechnik und nutzten aufmodulierte Tonsignale zur zur Ansteuerung der Ruder via Stellmotoren (Servos).
Rotoren Link to heading
Die ersten UAVs waren Helikopter-Modelle, also besitzen einen horizontalen Hauptrotor für Auftrieb und Steuerung und einen kleinen vertikalen Heckrotor zur Stabilisierung. Die Profile des Hauptrotors werden über Gestänge und Neigung einer Taumelscheibe während der Rotation geneigt um die Flugrichtung zu bestimmen. Die direkte Steuerung der beiden Servos für die Taumelscheibe und die Geschwindigkeit der Rotoren durch den Piloten erfordert noch mehr Übung als bei einem klassischem Flächenmodell und die komplexe und fehleranfällige Mechanik machten Modell-Helikopter nicht sehr populär und teuer. Lediglich Helikopter mit Koaxialrotor und Paddelstange waren wegen einer gewissen Selbststabilisierung als Flugmodelle halbwegs erfolgreich und vergleichsweise einfach zu fliegen.
Aus Kostengründen (zuverlässige Mechanik ist teurer als Mikroelektronik und kleine Motoren) verdrängten letztlich aber Multikopter mit vier Rotoren (Quadrokopter) fast alle anderen Antriebssysteme, obwohl hier nur ein mäßig leistungsfähiger Microcontroller als Flight-Controller notwendig wird, denn über eine Fernsteuerung wird kein Pilot die manuelle Regelung von vier Motoren für eine stabile Fluglage erreichen - vor allem wenn das Fluggerät nicht vollständig und in großer Nähe im Blickfeld ist.
Sensoren und KI Link to heading
Mit den bei Multicoptern notwendigen Flightcontrollern kam auch mehr Autonomie in die UAVs. Ging es zuerst rein um Lage- und Bewegungserkennung, wünschte man später eine exakte Positionsbestimmung und schließlich autonomen Rückflug zum Startpunkt. Das erfordert aber eine Vielzahl von Sensoren, die auch heute preiswerteren Flugmodellen meist noch fehlt. Die schnelle Echtzeitverarbeitung von Sensoren bis hin zu Kameras erfordert viel Rechenleistung für Prozesse bis hin zur Bilderkennung, autonomen Flugmanövern und Steuerung durch Gesten des Piloten. Hier ist bereits KI-Technologie im Einsatz, die Prozessoren mit mehr Rechenkernen als der heimische PC erfordert. Schon die mit 100 Euro noch preiswerte “Spielzeugdrohne” Ryze Tello basiert auf einem Intel-Prozessor mit 14 Rechenkernen, dem Movidius Myriad 2. Die nur 80g leichte Tello nutzt ein Bilderkennungssystem mit Bodenkamera, um ihre Position auch in kleinen Räumen so stabil zu halten, dass sie auch dort programmgesteuert autonom fliegen kann. Technische Details siehe Intel Movidius Myriad.
Diese modernen, “intelligenten” Fluggeräte wären ohne das iPhone und nachfolgende Smartphones nicht möglich gewesen, denn jedes Smartphone besitzt auch die meisten der nachfolgend beschriebenen Sensoren bereits (Gyroskop, Beschleunigungsmesser, Barometer, Thermometer, Kompass, Kameras) und Microcontroller, um deren Datenflut zu verarbeiten. Außerdem werden Internet (IP-)Protokolle und WLAN -Verbindungen zur Verbindung von Fluggerät und Steuerung genutzt - oft wird statt einer klassischen Fernsteuerung auch gleich ein Smartphone genutzt - oder ein Betrieb der Steuerung ist ohne zusätzliches Smartphone überhaupt nicht möglich.
Trägheitsnavigationssystem IMU (Inertial Measurement Unit) Link to heading
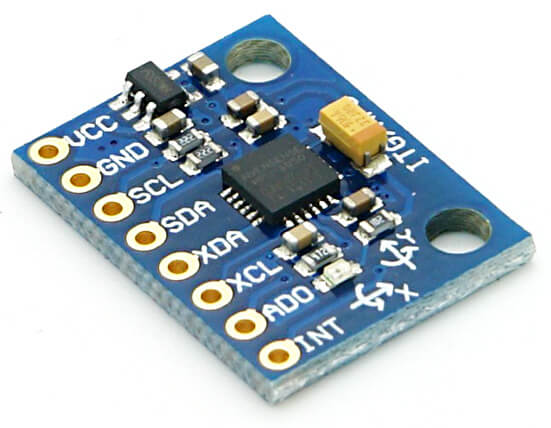
Ein Fluggerät ohne Sensoren ist blind, weiß nicht wo oben, unten, vorne, hinten, links und rechts ist und ob und wie es sich gerade dreht oder bewegt. Auch Flugzeuge haben dafür als Instrument einen “künstlichen Horizont” bzw. einen Kreiselkompass. Das Trägheitsnavigationssystem einer Drohne ist heute ein elektronisches Bauteil, welches Drehung um alle drei Hauptachsen und Beschleunigung in jede Richtung erkennt (Gyroskop oder Accelerator = IMU).
Die IMU muss gelegentlich etwa bei Schwerpunkt-Verlagerungen und Umbauten wie Propeller-Wechsel neu kalibriert werden und bestimmt die “Normalausrichtung” der UAV (siehe obige 6 Richtungen). Die IMU ist essentiell für die Steuerung der Motoren zur Beibehaltung der “normalen” Ausrichtung beim Start der Fluggeräts. Leider erkennt der Accelerometer nur Beschleunigung, aber keine konstante Bewegung, wenn die Drohne etwa in irgend eine Richtung weg driftet. Jede Billigdrohne sollte also heute zumindest eine gute IMU haben, zum driften wird sie aber dennoch neigen. Leider ist die IMU sehr stör-empfindlich gegenüber Magnetfeldern, besonders beim Kalibrieren sollten nicht zu viele Metallteile in der Nähe sein und elektrische und elektronische Geräte in der Nähe ausgeschaltet werden.
Barometer Link to heading

Wie Flugzeuge sollten heute bereits billigere UAVs (~50 Euro) eine barometrische Höhenmessung haben, um stabil die Höhe zu halten. Auch hier gibt es winzige elektronische Bauteile, welche neben hochpräziser Luftdruckmessung auch die Temperatur und Luftfeuchtigkeit messen - bei aller Fliegerei sind solche meteorologischen Daten sehr wichtig, auch für teilautonom fliegende, moderne Drohnen. Mit der Flughöhe nimmt der Luftdruck relativ zur Startposition ab und das können gute Sensoren heute auf wenige Zentimeter genau messen. Das ist viel genauer als mittels GPS und funktioniert auch noch in Innenräumen, wo GPS-Satelliten nicht mehr erreichbar sind. Alle Fun-Drohnen, die auch im Zimmer geflogen werden, sollten neben der IMU zumindest ein solches Barometer haben.
GPS (global positioning system) Link to heading
GPS kennt man heute von jedem Smartphone und Anwendungen wie Google Maps. Jede Drohne, die auch draußen geflogen werden soll, sollte zumindest GPS Unterstützung bieten. Da gibt es allerdings kaum etwas für weniger als 100 Euro - zumindest nichts, das auch sonst halbwegs sicher fliegen kann. Racing-Drohnen werden ausschließlich in speziellen Parcours geflogen und erfordern erhebliche Piloten-Geschicklichkeit und ein möglichst geringes Gewicht - da mag GPS nicht notwendig sein und GPS-Empfänger sind durch die notwendigen Quadrifilare Helixantennen und aufwändigere Elektronik verglichen mit den vorgenannten Sensoren relativ schwer und teuer. Für Photodrohnen, die etwa im Stativ-Modus (Tripod) für ein Photo stabil in der Luft “stehen” sollen, ist GPS aber unverzichtbar. Leider funktioniert GPS nur im Freien und wird durch hohe Wände, Bäume, Masten etc. auch abgeschattet. Eine Drohne sollte deshalb nicht nur das amerikanische GPS unterstützen, sondern möglichst auch russische Glonass- Satelliten und europäische Galileo-Satelliten empfangen können. Für eine halbwegs brauchbare Positionsbestimmung sollten 10 Satelliten erreichbar sein (DJI Drohnen aktivieren GPS erst bei 10 Satelliten). Ohne GPS oder ein noch aufwändigeres, Kamera-basiertes visuelles Positioniersystem (VPS) kann keine Drohne ihre horizontale Position halten und driftet etwa durch Wind weg.
Leider verkaufen betrügerische Händler Plagiate bekannter Drohnen wie der DJI Mavic (etwa als mit 99€ noch stark überteuerte “DroneX”), die noch nicht einmal GPS-Empfänger haben und ohne viel Flugerfahrung nicht sicher zu steuern sind.
Magnetometer (Kompass) Link to heading
Die IMU kann nur eine relative Drehung und Position eines Fluggeräts feststellen, aber keine kartographische Himmelsrichtung. Auch GPS-Daten nutzen also nicht viel, wenn man die Himmelsrichtungen nicht kennt, deshalb haben ja auch Smartphones meist einen Magnetkompass. Flugzeuge und Autos profitieren von ihrer Bewegung und erkennen dabei die Bewegungsrichtung durch GPS-Koordinatenänderungen. In der Luft stehende Drohnen und unbewegte Personen brauchen zum “Einnorden” einen Magnetkompass. In Drohnen und Smartphones ist dafür ein winziger Hall-Sensor oft schon im Microcontroller integriert. Leider ist einerseits das Erdmagnetfeld an weit voneinander entfernten Orten sehr unterschiedlich und es gibt sehr viele Störquellen von elektrischen Geräten über Metallkonstrukte bis hin zu Eisenerz im Boden. Deshalb muss der Kompass von Drohnen und Smartphones auf Reisen manchmal neu kalibriert werden - dabei sollte man mögliche Störquellen in der Umgebung meiden und nicht etwa zum Kalibrieren in einem Auto sitzen.
Mikrosystemtechnik Link to heading
Die oben beschriebenen Sensoren sind mittels Mikrosystemtechnik realisiert. Mikrosystemtechnik kombiniert Mikroelelektronik mit mechanischen Bauteilen auf dem Chip, die nur wenige Mikrometer groß sind. Das können bekannte (elektro-)mechanische Bauteile wie Zahnräder oder Motoren sein, im Falle der Sensoren sind es Membranen, Stege oder Flächen, die durch äußere Kräfte verformt werden. Bei Barometern oder Mikrofonen bewirkt Luftdruck auf eine Membran eine Verformung, bei Accelerometern “verbiegen” durch Beschleunigung bzw. die Schwerkraft verursachte Kräfte Stege. Dieses Verformen erzeugt entweder durch den piezoelektrischen Effekt eine messbare elektrische Spannung oder der Abstand von durch einen Isolator (Dielektrikum) getrennten elektrisch geladenen Flächen verändert die Kapazität eines solchen Kondensators was auch eine Änderung der Spannung oder Lade/Entladezeiten bedeutet. In jedem Falle wird ein mechanischer Effekt elektrisch messbar und von der Mikroelektronik des Chips direkt Analog->Digital gewandelt, umgerechnet und kann dann numerisch bereits in der gewünschten physikalischen Einheit abgefragt werden. Die Datenübertragung erfolgt meist über eine gängige Zweidraht-Schnittstelle und der Sensor kann oft noch für die zu verwendende Einheit (Temperatur in Celsius,Kelvin, Fahrenheit, Druck in Bar oder Hektopascal, Beschleunigung in m/s² oder g) konfiguriert werden. Die meisten Mikrocontroller bieten gute Unterstützung für diese Zweidraht-Schnittstellen.
Abstandsmessung und Kollisionsvermeidung Link to heading
Die leider teuersten und aufwändigsten Sensoren dienen der Abstandsmessung bzw. Kollisionsvermeidung. Per Barometer ist zwar die Höhe über dem Startpunkt bekannt, aber nicht die aktuelle Höhe über dem Boden oder Hindernissen. Eine Kollision mit dem Boden oder auch nur das sichere Landen abseits vom Startort ist also ohne Abstandsmessung zum Boden schwierig. Die preiswerteste Lösung sind Ultraschallsensoren unten, bei teuren Drohnen wie der DJI Mavic gibt es diese auch an allen anderen 5 Seiten zwecks Kollisionsvermeidung. Leider funktionieren Ultraschallsensoren, wie man sie ja auch bei Auto- Einparkhilfen kennt, nicht sehr weit (einige Meter) und sind ziemlich ungenau, vor allem was kleinere Hindernisse wie Zweige oder Drähte angeht.
Wesentlich besser sind optische Systeme - ideal sind je zwei Kameras (zwecks stereotypischem Sehen) an allen Seiten. Kameras an der Unterseite können auch gut Bodenmuster nutzen, um eine visuelle Positionsbestimmung zu ermöglichen. Das funktioniert schon sehr gut bei der kleinen Ryze Tello für 100 Euro, die dadurch sogar in kleinen Räumen absolut flugstabil bleibt - selbst wenn man sie anstößt, sofern der Boden nicht spiegelt, zu dunkel oder komplett einfarbig ist. Auch die Kamera- Flughöhenbestimmung eignet sich leider nur für geringe Höhen (~ 10m), professionelle Drohnen verwenden dann z.B. Infrarotlaser.
Werden Kameras zur Navigation verwendet, ist natürlich auch eine hohe Rechenleistung und Software zur Bilderkennung nötig. Dabei kommen KI-Algorithmen,neuronale Netze und spezielle Prozessoren (VPUs) wie der oben genannte Intel Mavision Myriad 2 zum Einsatz, die in diesem Spezialbereich leistungsfähiger als die meisten PCs sind.
Mit der Bilderkennung wird bei künftigen Drohnen mit Gestensteuerung sicher auch eine Identifizierung des Piloten per Gesichtserkennung möglich - ansatzweise passiert das ja bereit bei meiner DJI Spark von 2017. Das bringt natürlich wieder Datenschutz- Fragen auf. Wenn der Gesetzgeber aber einerseits an sicheren Fluggeräten interessiert ist, muss er die Teilautonomie intelligenter Drohnen, die sich visuell orientieren auch in Kauf nehmen - vergleichbare Probleme sind ja auch bei autonomen Fahrzeugen zu erwarten, die ja aus Gründen der Sicherheit und auch Ökologie durchaus erwünscht sind. Besonders mit der bereits angekündigten Kommerzialisierung von Drohnen z.B. für Lieferdienste sollen ja autonom fliegende Drohnen kommen und diese funktionieren ohne KI und visuelle Positionierung halt nicht zuverlässig. Wie Smartphones werden solche Fluggeräte bei Massenfertigung auch so preiswert, das auch Privatleute sie etwa als fliegende Kamera kaufen möchten. Bei entsprechender Nachfrage wird so etwas auch hergestellt und eine Herstellerlobby wird dann (wie heute bei besagten Transportdiensten) unsre Laien-Politiker in Brüssel schon irgendwie “überzeugen” - man munkelt da ja nicht ohne Grund oft vom Inhalt schwarzer Köfferchen.
Teilautonomes Fliegen Link to heading
Bei so viel Elektronik und evtl. noch Zugriff auf Kartenmaterial kommt schon so viel Autonomie ins Spiel, das man bei diesen UAVs wirklich von Drohnen sprechen kann. Wirklich “semiprofessionelle” Drohnen erreichen einen hohen Sicherheitsstandard, indem sie Karten mit “No-Fly” Zones nutzen, um so etwa in der Nähe von Flughäfen oder anderen Verbotszonen gar nicht mehr starten. Rückflug zum Startort auch mit Umfliegung von Hindernissen bieten einige Drohnen schon und initialisieren das bei Abbruch der Funkverbindung automatisch. Meine DJI Spark erkennt ihren Piloten und kann die wichtigsten Grundfunktionen auch durch Gestensteuerung durchführen oder mir oder einem wählbaren POI (point of interest) folgen. Freilich passieren da durch beschränkte “künstliche” Intelligenz leicht Fehler und diese Manöver können jederzeit per Fernsteuerung sofort beendet werden - sonst wäre deren Benutzung auch gänzlich unzulässig. Man sollte sich jedenfalls auch keinesfalls darauf verlassen, besonders wenn Hindernisse in der Nähe sind für welche die Drohne (etwa oben, hinten oder an der Seite) keine Sensoren hat. Bei einigen Manövern fliegt die Spark etwa rückwärts hoch, um dann den Piloten zu umkreisen - dabei führen unerkannte Hindernisse zwangsläufig zum Absturz.
Bei der Return-Home Funktion wird meist erst einmal eine einstellbare Höhe angeflogen, über welche die Drohne den Rückweg antritt. Hat man hier einen zu hohen Baum im Weg, war’s das auch wieder- sofern nicht auch Seitensensoren existieren, die autonom ein sicheres Umfliegen ermöglichen. Wie überall bekommt gut Qualitätsgesicherte Software auch bei Drohnen eine immer größere Bedeutung zu und die KI steckt hier noch in Kinderschuhen.
Funkverbindung Link to heading
Solange Funk-Fernsteuerungen direkt Servos regelten, steuerte man Flugmodelle per Kurzwelle mit 35 MHz oder 40 MHz, weil das ebenfalls freie 27 MHz Frequenzband etwq durch CB-Funk zu störanfällig war. Seitdem auch Daten - insbesondere auch Videos - und Telemetrie-Daten in der Gegenrichtung gesendet werden, nutzt man Internet-Protokolle (TCP und UDP) zur Kommunikation zwischen Steuerung, Smartphone und Fluggerät. Viele Drohnen lassen sich so per WLAN auch direkt mit dem Smartphone - ganz ohne spezielle Fernsteuerung - steuern. Leider ist besonders das noch oft verwendete 2.4 GHz Frequenzband auch durch Bluetooth, DECT-Telefone und Störstrahlung von Mikrowellenherden stark ausgelastet. Das geht besonders in bewohnten Gebieten sehr zu Lasten der Reichweite und Stabilität der Funkverbindung. Bessere Drohnen nutzen hier zusätzlich das noch weniger genutzte 3.5 GHz Band, vor allem zur Bildübertragung, was aber eine schlechtere Durchdringung bietet und bei Hindernissen leicht zu Funkschatten führt. Verschlimmert wird die Situation noch durch die europäische CE-Norm viel geringere Sendeleistung als etwa beim amerikanischen FCC- oder chinesischem Beidu- Standard. Die von den chinesischen Drohnenherstellern meist genannten Reichweiten von einigen Kilometern gelten also in Europa nicht. Mehr als 500m sind bei Verwendung von WLAN generell illusorisch, da man aber sowieso die Drohne nur in Sichtweite fliegen darf, ist das kein ernstes Problem - sollte wenigstens über diese Entfernung eine störungsarme Funkverbindung möglich sein. Besser im Interesse unserer aller Sicherheit, Drohnen ein spezielles Frequenzband zu überlassen, ähnlich wie es seinerzeit bereits bei der Frequenz 27 MHz war, die durch den damals sehr populären CB-Funk bereits für Flugmodelle zu unsicher wurde.
Etwas Hoffnung kommt mit dem neuem Mobilnetz- Standard 5G auf, der ja dann auch legal autonom fliegende Drohnen ermöglichen soll. Ob man als privater Drohnenflieger von so etwas jemals profitieren kann, wage ich zu bezweifeln, weil allein schon die Versteigerung der Frequenzen wieder nur den üblichen Verdächtigen unter den Großunternehmen Zugang gewährt und es für Privatleute entweder nicht möglich oder abartig teuer sein wird (wie heute noch mobiles Internet).
Statt populistisch bei jeder Fly-Away Drohne eine neue Sau durchs Dorf zu treiben, welche die Gefährlichkeit von Drohnen für Flugsicherheit, Leib und Leben beschwört, sollte es im Interesse der Allgemeinheit sein, endlich eine freie Funk-Infrastruktur bereit zu stellen, die einen sicheren Drohnenflug auch Freizeit-Piloten und Photo/Video- Amateuren überhaupt erst ermöglicht. Das dient letztlich auch der Demokratie, denn durch immer rigidere Drohnenverbote wird auch die Aufdeckung von Problemen wie Umweltbelastungen und Straftaten durch unbefangene Bürger erschwert. Drohnenverbote dienen zwar vorgeblich der Sicherheit und Privatsphäre der Bürger, taugen aber gut auch zur Vertuschung krimineller und rechtsstaatlich fragwürdiger Handlungen.
Verbindungsabbruch Link to heading
Leider sind Funkverbindungen, sowohl die Verbindung zwischen Fernsteuerung und UAV als auch der GPS Empfang sehr empfindlich gegen Störungen. Reisst die Verbindung zur Fernsteuerung für einen einstellbaren Zeitraum ab, beginnt die Drohne automatisch den Rückflug. Dadurch kommt meist auch eine Verbindung wieder rechtzeitig zustande und erlaubt auch den Abbruch des automatischen Rückflugs und ermöglicht wieder ein manuelles Steuern. Schlechter ist ein Ausfall des GPS (wenn der Pilot etwa meint unter einer großen Stahlbrücke durchfliegen zu können). Dann fällt das Positioniersystem aus, die Drohne beginnt zu driften und der Pilot muss sie im ATTI (AltHold) Modus fliegen können, wo nur noch mittels Barometer die Höhe stabil gehalten wird. Darum sollte jeder Pilot lernen, seine Drohne auch in diesem ATTI Modus zu fliegen.
Noch schlimmer ist ein Ausfall von WLAN- Verbindung und GPS. Da führt die Drohne eine “Notlandung” durch, wo sie sich gerade befindet. Über Wasser ist das natürlich mit dem Verlust der Drohne verbunden. Man sollte sich also gut überlegen, ob man unbedingt Flussbrücken unterfliegen möchte. Über Wasser sollte man auch niemals mit einer Drohne mit nur visueller Positionierung per Bodenkamera (VPS) wie der DJI/Ryze Tello fliegen. Ohne Positions-Bestimmung wird auch diese bei WLAN-Problemen im Wasser “notlanden”.
Auch die beliebten “Dach-Inspektionen” nach einem Sturm können schief gehen. Erstens gerät die Drohne temporär außer Sicht- was ja schon einen Verstoß gegen die “Drohnenregulierung” darstellt, dann gerät die Drohne auch noch in einen Funkschatten, landet auf dem nicht überall sicher zugänglichem Dach oder kracht gegen die Hauswand, wenn das Haus höher ist als die eingestellte Rückflughöhe.
Metereologisches Link to heading
Wie alle elektronischen Geräte mögen die meisten Drohnen keine Feuchtigkeit - denn sie sind ja eigentlich “fliegende Smartphones”.
Die meisten sind noch nicht einmal gegen Spritzwasser oder gar Regen geschützt. Nebel und Wolken verbieten sich auch schon aufgrund der schlechten Sichtbarkeit für den Piloten (siehe Drohnenverordnung), eine stabile Funkverbindung ist auch nicht mehr gesichert und gelangt Feuchtigkeit in die Elektronik, nimmt diese ebenso Schaden - wie ein Smartphone das nass wurde. Der Youtuber Tom Frey hat auf seiner Seite Drohnenhandbuch zwar recht beeindruckend die Stabilität der DJI Spark getestet, man sollte alles dort Gezeigte aber unbedingt sein lassen.
Auch Wärme und Kälte sind schädlich - auch für die Lithium-Polymer Akkus. Bei Kälte sinkt die Kapazität und damit Flugdauer drastisch, bei zu großer Hitze werden sie gefährlich. Sowohl beim Aufladen als auch Entladen erwärmen sie sich so stark, das man sie niemals unmittelbar nach dem Flug wieder aufladen darf. Jede gute Drohne übermittelt per Telemetrie auch die Temperatur der Akkus und warnt beim Überschreiten oder Unterschreiten kritischer Temperaturen. Auch die Umgebungstemperatur nimmt da natürlich Einfluss.
Wichtig ist die Berücksichtigung der Windgeschwindigkeit. Kleine Spielzeugdrohnen, die nur 250g wiegen oder die nur 80g leichte Ryze Tello können nur bei fast völliger Windstille sicher geflogen werden. Sie sind sehr agil, das bedeutet aber auch, das bereits geringe Kräfte sie aus der Bahn werfen und ihre Motoren nur ihrem geringen Gewicht angemessene Kräfte entwickeln. Besonders Multikopter bleiben ja nur durch andauernde und komplexe Regelmechanismen in einer stabilen Fluglage. Sinken Multikopter zu schnell ab, kommt es durch Rezirkulation der Luftströmungen an den Rotoren zu einem “Wirbelringstadium”, das ähnlich wie der gefürchtete Strömungsabriss bei Flugzeugen sicher zum sofortigen Absturz führt.
Zusammenfassend kann man sagen, dass man Multikopter nur bei “schönem”, trockenem Wetter bei guter Beleuchtung (Flüge bei Dunkelheit und schlechten Sichtverhältnissen erfordern eine Ausnahmegenehmigung, die Hobbyisten nicht bekommen) und nur geringem Wind fliegen sollte.
Rechtslage Link to heading
Fliegen ohne Aufstiegs- oder Überflugs- Berechtigung ist mindestens eine Ordnungswidrigkeit und oft auch strafrechtlich relevant. Man verstößt dabei leicht gegen Gesetze und Verordnungen aus allen folgenden Bereichen:
- Luftverkehrsgesetz LuftVG
- Luftverkehrsordnung LuftVO
- Luftverkehrszulassungsverordnung LuftVZO
- Standardized European Rules of the Air SERA
- Persönlichkeitsrecht
- Datenschutzgrundverordnung DSGVO
- Urheberrecht
Das alles hier im Detail darzustellen, sprengt nicht nur den Rahmen, ich bin als Laie auch nicht in der Lage Gesetze hier richtig oder gar allgemein verständlich wiederzugeben. Darum setze ich hier nur einige Links auf aktuelle Rechtsbelehrung seitens der verantwortlichen Behörden:
Zuerst die offiziellen Drohnenregeln, herausgegeben vom Bundesministerium für Verkehr und digitale Infrastruktur: Klare Regeln für Betrieb von Drohnen Über die Klarheit und Verständlichkeit dieser Regeln für den Bürger kann man freilich streiten. Der Interpretationsfreiraum erinnert oft eher an religiöse Schriften wie den Koran oder das alte Testament.
Beispiel: Link to heading
Über Wohngrundstücken, wenn die Startmasse des Geräts mehr als 0,25 kg beträgt oder das Gerät oder seine Ausrüstung in der Lage sind, optische, akustische oder Funksignale zu empfangen, zu übertragen oder aufzuzeichnen
Welche irgendwie ferngesteuerte Drohne hat keine “Ausrüstung” um optische, akustische oder Funksignale zu empfangen ?!? Ist die durch visuelle Positionierung und eine stabile Funkverbindung verbesserte Sicherheit unerheblich ? Sind Fly-Aways durch Verbot derartiger Sichernheitsmerkmale erwünscht? Wer definiert so einen Quark?
Interessant ist auch die rechtlich offizielle Definition des Begriffs Drohne:
// Unter einer „Drohne“ versteht man ein unbemanntes Fluggerät. Das Luftrecht unterscheidet zwischen unbemannten Luftfahrtsystemen und Flugmodellen. Gemäß § 1 Luftverkehrsgesetz handelt es sich bei unbemannten Luftfahrtsystemen um ausschließlich gewerblich genutzte Geräte. Flugmodelle sind hingegen privat, also zum Zwecke des Sports oder der Freizeitgestaltung genutzte Geräte. //
Also wenn ich als Hobbyist zur Freiheitsgestaltung irgendein Fluggerät betreibe ist es nie nicht eine “Drohne”, sondern immer nur ein Flugmodell. Noch alles klar auf der Andrea Doria ?
Der obigen ach so klaren Regeln von 2017 steht die Umsetzung des vereinheitlichten europäischen Drohnenrechts von 2019 gegenüber. Neben dem Kenntnisnachweis (als Prüfung - nicht nur ein Online Training) auch für Drohnen ab 900g droht da evtl. die Notwendigkeit von Transpondern, also der elektronischen Fernübertragung von Drohnen-Seriennummern statt der heute erforderlichen Metall-Schildchen zur Kennzeichnung von Drohnen über 250g:
Die neuen Europäischen Drohnenregeln kommen
Zumindest lockert diese neue Verordnung vielleicht die Bedingungen in einigen europäischen Ländern wie Österreich oder Frankreich, wo man als Urlauber eigentlich kaum eine Möglichkeit bekommt, Urlaubserinnerungen mit einer Kameradrohne aufzuzeichnen.
Hier ein weiterer Kommentar zur neuen EU Drohnenverordnung: EU Drohnen Verordnung
Kein Platz für wilde Drohnen Link to heading
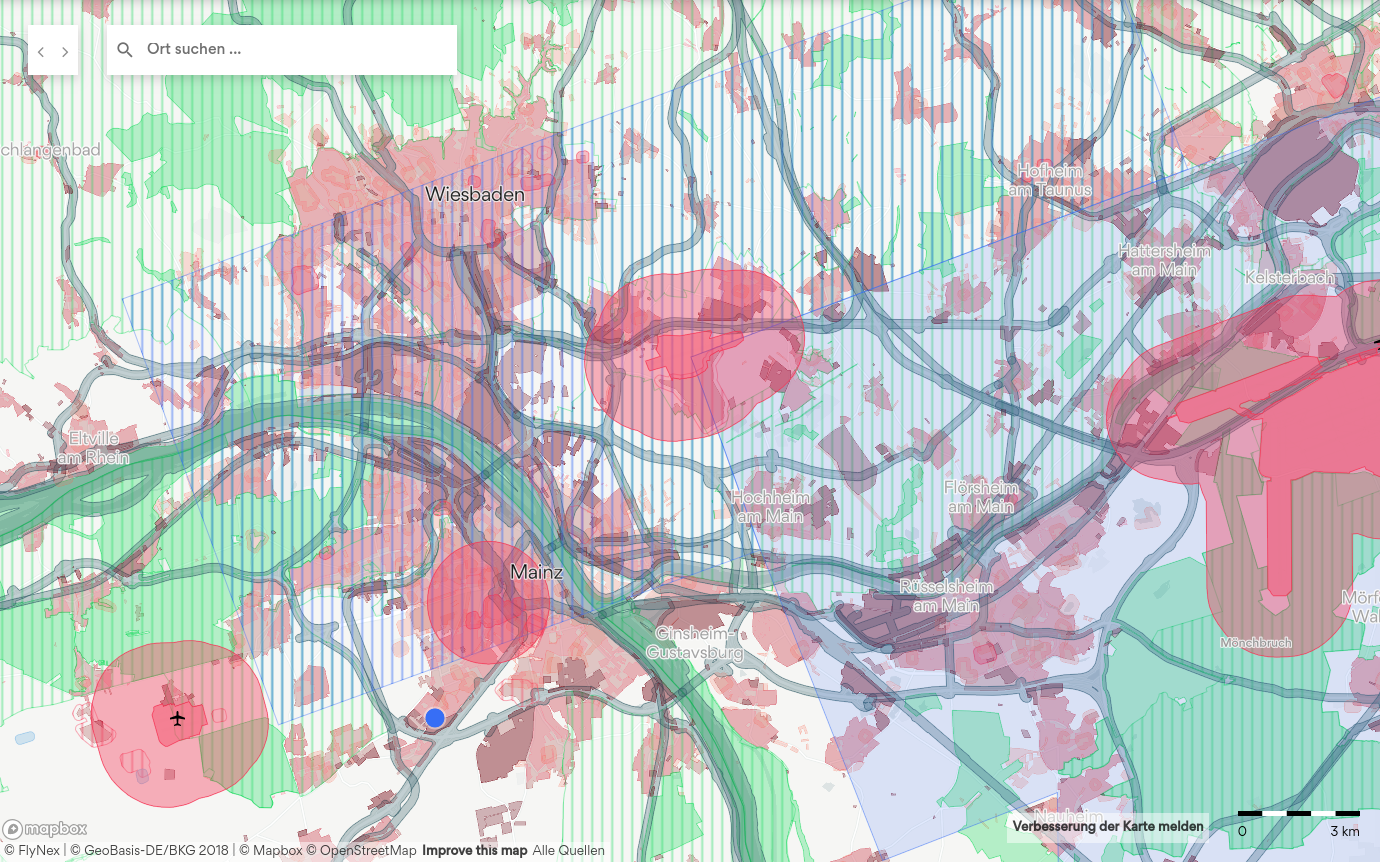
Zum Einstieg und zur Abschreckung erst einmal eine Karte der Region Mainz/Wiesbaden. Alle farbig bzw. schraffiert markierten Flächen sind Flugverbotszonen. Damit ist aber bei den verbleibenden weißen Flecken ein Fliegen nicht etwa erlaubt. Für diese muss man dann selbst weiter recherchieren, wer der Eigentümer ist und sich bei diesem sicherheitshalber eine Start- oder Überflugs-Erlaubnis einholen. Das kann außer einer Privatperson oder Firma natürlich auch eine Gemeinde sein, die wie Mainz, Wiesbaden oder Frankfurt Drohnenfliegerei kategorisch verbietet.
Auf eine konkrete Anfrage an die zuständige Sachbearbeiterin der Stadt Mainz erhielt ich etwa folgende Antwort:
//“Das Gonsbachtal ist als Landschaftsschutzgebiet ausgewiesen. Nach der Rechtsverordnung ist es verboten, Modellfahrzeuge und Modellflugzeuge aller Art zu betreiben ( § 4 Abs. 1 Nr. 24 Rechtsverordnung über das Landschaftsschutzgebiet “Gonsbachtal”). Der Flug mit einer Drohne ist somit nicht zulässig.
Für Flächen die nicht unter Schutz stehen ist zu beachten, dass die Biotope und die hier vorkommenden Arten nicht beeinträchtigt werden. Um dies sicherzustellen sollen diese Flächen mindestens im Zeitraum zwischen 01.03. und 30.10. nicht überflogen werden. Aus Gründen des Biotop- und Artenschutzes kann ein Überfliegen städtischer Biotopflächen sowie das dortige Starten und Landen nicht in Aussicht gestellt werden.”//
Also herrscht auch für alle nicht geschützten Gebiete - die mglw. “Biotope” sein könnten - außer (vielleicht) im Winter Drohnenflugverbot im Mainzer Einflussgebiet. In der feuchtkalten und windigen Jahreszeit gibt es aber für eine Kameradrohne einerseits kaum etwas zu sehen und es ist auch für die Drohne kein sicheres “Biotop” mehr (siehe Absatz “Meteorologie” oben).
Zurück zu den “weißen Flächen”: Das meiste davon ist in Privatbesitz und meist auch gar nicht zugänglich (umzäunt). Die einzig verbleibende Möglichkeit für eine Drohnenflugerlaubnis ist also ein Verhandeln mit einer Privatperson, deren Grundstück nicht in einer der vielen Verbotszonen liegt, also z.B. nicht Wohngebiet ist oder Industrie- oder Energiegewinnungs-Anlagen (Solarpanels auf dem Dach?) enthält.
Die grün schraffierten Bereiche der Karte oben sind Forst- und Agrarflächen. Auch hier kann ein Verhandeln mit dem Landwirt oder Förster vielleicht zu einer Erlaubnis führen.
Noch eine Anmerkung zu Wohngrundstücken. Auch hier kann man ja mit den Eigentümern und Bewohnern klären, ob man seine Drohne starten bzw. das Grundstück überfliegen darf. Die Karten markieren alle Wohngebiete als Sperrgebiet. Verbote gelten aber nur für konkrete Wohngrundstücke wobei ein Wohngrundstück nur ein Grundstück mit max. 20% Gewerbe ist. Ein Überfliegen von teilweise gewerblich genutzten Grundstücken ist also erlaubt, solange man nicht Persönlichkeitsrechte oder Urheberrechte durch veröffentlichte Fotos/Filme verletzt.
Kartenmaterial Link to heading
Für den Luftverkehr allgemein gibt es die “offiziellen” und rechtlich verbindlichen ICAO Luftfahr-Karten. Diese enthalten aber viele für private Drohnenpiloten relevanten Einschränkungen (wie auch obige “Biotope” und Naturschutzgebiete) nicht. Wenn man in seinem Urlaub nur spontan ein paar schöne Landschaftsimpressionen fotografieren will, findet wohl auch nur eine Buchhalter-Natur Gefallen daran, mit ICAO Karten einen aufwändigen Flugplan wie für eine Fernreise zu erstellen.
Im Web und als Smartphone-App gibt es eine ganze Menge Kartenmaterial. Bei all diesen Sites kann man sich (kostenlos) zur Nutzung registrieren, hat aber dort auch die Möglichkeit seine Flüge zu planen, denn als gewerblicher Drohnenpilot und für Drohnen über 2kg Gewicht muss man auch ein Flugbuch führen, das detailliert alle erfolgten Aufstiege, Flüge und Landungen dokumentiert.
Sehr gut gefällt mir die Site Map2Fly, mit der ich auch den Kartenausschnitt oben erstellt habe. Sie erscheint ziemlich vollständig, liefert beim Klicken auf einen Zielort schnell und übersichtlich, was da geht oder warum nicht und auch das Rein/Raus- Zoomen ist schön performant. Map2Fly gibt es auch als App für iOS und Android
Unverzichtbar ist auch die iOS / Android Drohnen App der deutschen Flugsicherung. Bis vielleicht auf Landschaftsschutzgebiete, Schrebergärten, Streuobstwiesen und andere “Biotope” findet man hier auch alles und der Bedienkomfort mit dem Smartphone vor Ort ist sehr gut.
Wer im Ausland seine Drohne nutzen möchte, sollte sich zuerst über die dortige Rechtslage informieren. In Österreich und Frankreich geht ohne kostenpflichtige Registrierung der Drohne (Österreich für 300 Euro) erst mal gar nichts. In Frankreich bekommen Ausländer nach meinem Informationsstand diese Genehmigung gar nicht erst. Sehr tolerant sind hingegen noch die Niederlande und Schweden. Aber wie gesagt- hier muss man sich am besten direkt vor einer Reise noch einmal informieren.
Wenn man für das Zielgebiet noch keine Karte gefunden hat, kann man sich auch noch bei Airmap (auch kostenlos) registrieren. Dort findet man eine Weltkarte, die zumindest alle Flugplätze, deren Kontrollzonen (CTR) und andere Luftfahrt-relevanten Verbotszonen darstellt. Teilweise habe ich dort auch schon Naturschutzgebiete gesehen, aber so vollständig wie die DFS App oder Map2Fly sind diese Karten sicher nicht.